团队文化展示
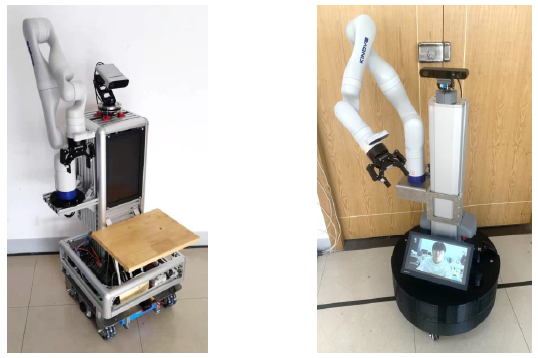
1 面向人机协作的医用护理机器人平台
自主设计移动平台,其中驱动板、电源管理板、控制器均为自主设计,实现激光导航、视觉导航和二维码导航,通过自主设计的路径规划算法,完成静态与动态环境下的高效路径规划和避障操作;
自主设计人机协作功能,通过视觉捕捉和语音交互,实现机器人的遥操作与技能学习,协助操作员完成物品抓取与搬运;
自主设计多模态人机交互功能,通过机器视觉与深度学习模型,实现语音、微表情、动作等融合识别与反馈,提升机器人的亲密感。
2 低速无人车系统
自主设计和构建集合激光雷达、多相机、毫米波雷达、GNSS等多型号传感器的无人车系统;
自主设计无人车的地图构建、定位导航、目标检测和运动控制等核心功能;
设计完成无人车系统的自主导航、自主循迹、模型预测控制、动态目标检测与避障等功能。

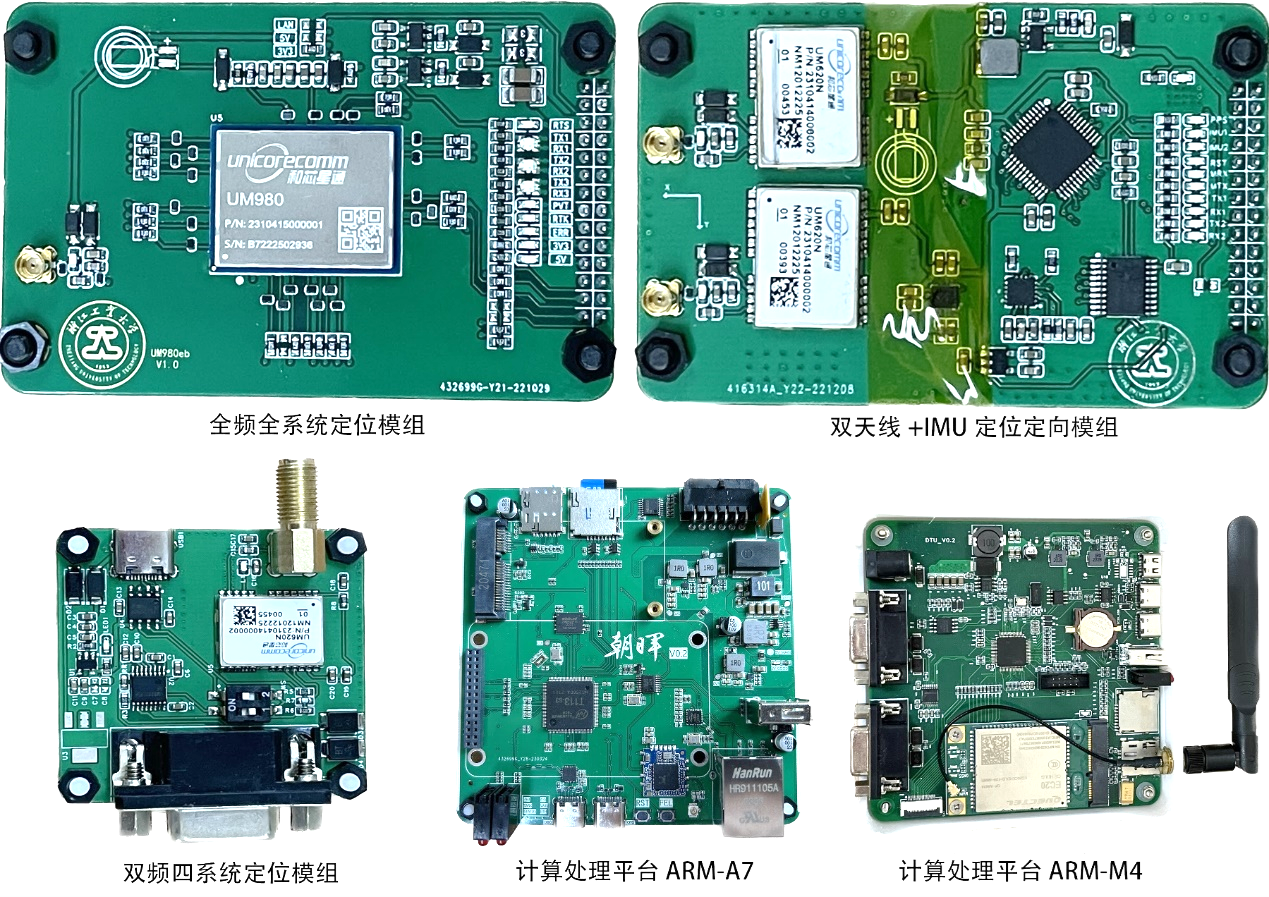
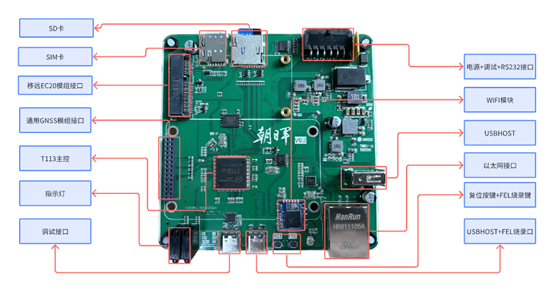
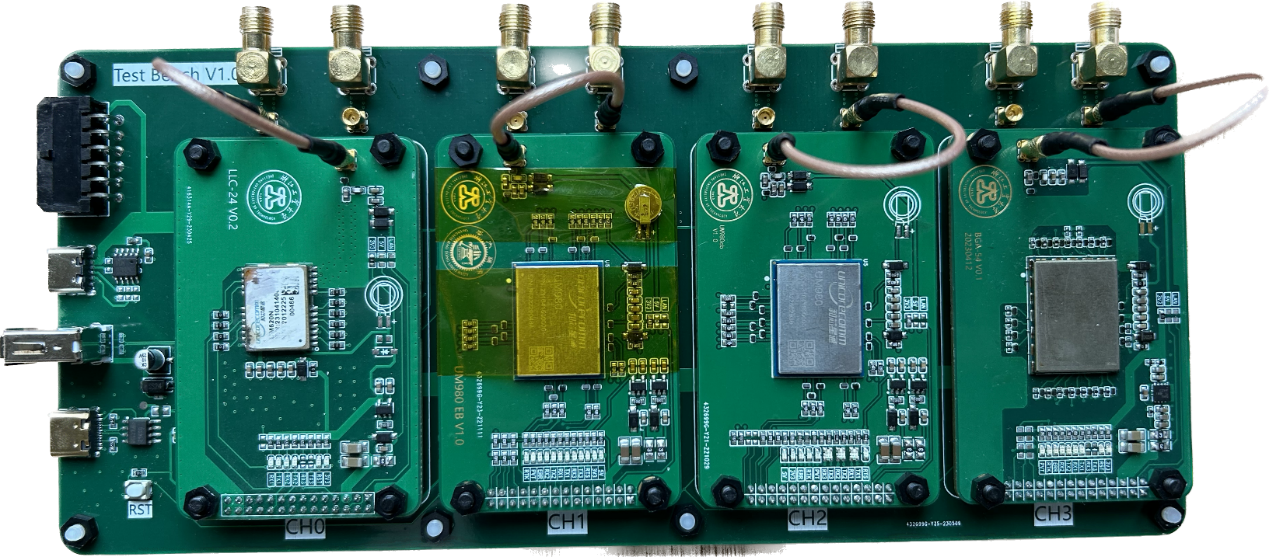
3 组合导航定位系统
GNSS定位系统:采用UM620N多频多系统模组和UM980全频全系统为代表的模组,配合计算处理平台及自研RTK算法,实现动态厘米级定位;
组合导航定位系统:采用UM620N多频多系统模组、IAM20680、ASM330LHH等MEMS芯片,配合自研计算处理平台、定位定向RTK算法和松、紧组合算法,可实现卫星信号失锁情况下位置信息100%可用。