
智能协同控制实验室
浙江工业大学智能协同控制实验室(Lab. Of Intelligent Cooperative control)是由浙江工业大学信息工程学院付明磊教授带领多名博士生以及研究生组成的一支科研团队。自成立以来,实验室一直致力于移动机器人定位导航技术、人机协作技术、无人系统智能感知技术的开发和高精度定位导航及滤波的研究,先后承担了包括国家自然科学基金、浙江省自然科学基金等多项重点项目。实验室主要课题方向包括:无人车定位导航、机器人路径规划、多智能体系统协同控制、高精度定位导航等等。 
1 机器人团队
本团队的研究以机器人系统的控制与交互技术为重点,主要围绕自主机器人的软硬件设计、环境感知、运动规划、以及人机交互等,努力解决目前智能机器人面临的各种复杂挑战。
2 无人车团队
我们聚焦于自动驾驶车辆领域,致力于研究多传感器融合、深度学习、计算机视觉和车联网的基础理论与应用技术,深入探索与状态估计、绘图、定位、无人车感知、控制和规划等相关的关键问题。我们的研究着眼于推动智能网联汽车技术的发展,并在多机器人调度、增强现实(AR)和虚拟现实(VR)等领域寻找新的应用前景。
3 RTK团队
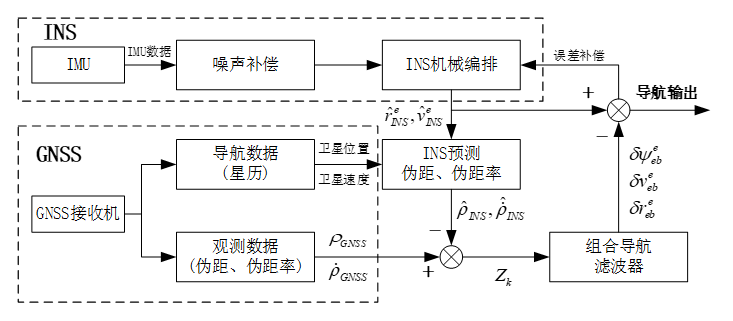
GNSS/INS融合:研究如何有效融合全球导航卫星系统(GNSS)和惯性导航系统(INS)的数据,以获得高精度的位置和姿态信息。这包括开发滤波和融合算法,以最大程度地减少误差和不确定性。
SLAM技术:研究同时定位与地图构建(SLAM)技术,包括基于视觉、激光或其他传感器的SLAM方法。开发算法和技术,使设备能够在未知环境中构建地图并实现自身定位。
数据融合:探索如何将来自不同传感器的数据融合在一起,以实现高度准确的导航和地图构建。这可能包括传感器校准、坐标转换和数据同步等方面的研究。
硬件平台开发
设计和制造硬件平台,包括GNSS接收器、惯性测量单元、传感器、计算单元等,以支持数据采集和处理。
软件开发和算法设计
(1)GNSS/INS融合算法:开发滤波算法,将GNSS和INS数据有效融合,以提供高精度的位置和姿态信息。
(2)SLAM算法:选择适合项目需求的SLAM算法,包括基于视觉、激光或深度传感器的SLAM,以实现地图构建和实时定位。
(3)数据融合:设计数据融合算法,以将不同传感器数据融合在一起,优化导航和地图构建。
实地测试和验证
选择各种测试场景,包括室内、城市峡谷、信号中断区域等,以验证系统性能和鲁棒性。
对硬件和软件进行严格测试,包括性能测试、环境测试和数据一致性验证。
应用开发
针对不同应用领域(如自动驾驶、室内导航、军事、物流等)开发相关应用程序和接口,以充分发挥组合接收机的潜力。
与行业合作伙伴合作,将技术应用于实际场景,获得反馈并不断改进系统。
商业化和推广
推动已开发的技术在商业市场中的应用,积极寻找潜在客户和合作伙伴,以推广项目成果。
提供培训和支持,以确保用户能够有效地使用组合接收机和相关应用。
项目实施的技术方案需要跨足硬件、软件、算法和实地验证,以确保GNSS/INS、SLAM/INS/GNSS组合接收机在多个应用领域中具有高性能和实用性。